ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
การเขียนโปรแกรม Robot (Quarky)
การเขียนโปรแกรม Robot (Quarky) ด้วย Word Blocks
บล็อกคำสั่ง Robot (Quarky) จะควบคุมการเคลื่อนที่ของหุ่นยนต์ การให้หุ่นยนต์เดินตามเส้น การควบคุมมอเตอร์และเซอร์โว
|
Go specified at % speed
|
บล็อกคำสั่งนี้ จะเคลื่อนหุ่นยนต์ Quarky ไปในทิศทางที่กำหนด คือ “ไปข้างหน้า”, “ถ้อยหลัง” ,“ซ้าย” และ “ขวา” พร้อมทั้งความเร็วในการเคลื่อนที่ |
|
Go specified at speed for seconds
|
บล็อกคำสั่งนี้ จะเคลื่อนหุ่นยนต์ Quarky ไปในทิศทางที่กำหนด คือ “ไปข้างหน้า”, “ถ้อยหลัง” ,“ซ้าย” และ “ขวา” และสามารถกำหนดความเร็วในการเคลื่อนที่และเวลาที่เคลื่อนที่ได้ |
|
Stop robot
|
บล็อกคำสั่งนี้ จะหยุดทั้งมอเตอร์ของหุ่นยนต์ Quarky |
|
Set parameter F,T1,T2
|
บล็อกคำสั่งนี้ จะตั้งค่าพารามิเตอร์บรรทัดต่อไปนี้สำหรับหุ่นยนต์ Quarky ค่า F , T1 และ T2 F:ความเร็วที่หุ่นยนต์จะเคลื่อนที่ไปข้างหน้าเมื่อตรวจไม่พบเส้นสีดำ T1 & T2: เมื่อหุ่นยนต์วิ่งตามเส้นและหากเซ็นเซอร์ตัวใดตัวหนึ่งบอกว่าตัวซ้ายตรวจพบเส้นสีดำ หุ่นยนต์จะออกนอกเส้นทางและต้องเลี้ยวซ้ายเพื่อกลับเข้าสู่เส้นทาง และเรารู้วิธีหมุนหุ่นยนต์ไปทางซ้าย มอเตอร์ด้านซ้ายเคลื่อนที่ไปข้างหลัง และมอเตอร์ด้านขวาเคลื่อนที่ไปข้างหน้า แต่ถ้าทั้งสองเคลื่อนที่ด้วยความเร็วเท่ากัน การเคลื่อนไหวของหุ่นยนต์ก็จะกระตุกและไม่มีประสิทธิภาพ ดังนั้นเราจะมีความเร็วสองระดับในการหมุน T1 และ T2 โดยที่ T1 จะเป็นความเร็วที่มอเตอร์จะเคลื่อนที่ไปข้างหน้าและ T2 จะเป็นความเร็วที่มอเตอร์จะเคลื่อนที่ถอยหลัง |
|
Do line following
|
บล็อกดำเนินการบรรทัดตามลอจิกอัตโนมัติด้วยพารามิเตอร์ที่ระบุในบล็อกพารามิเตอร์ชุด F () T1 () T2 () |
|
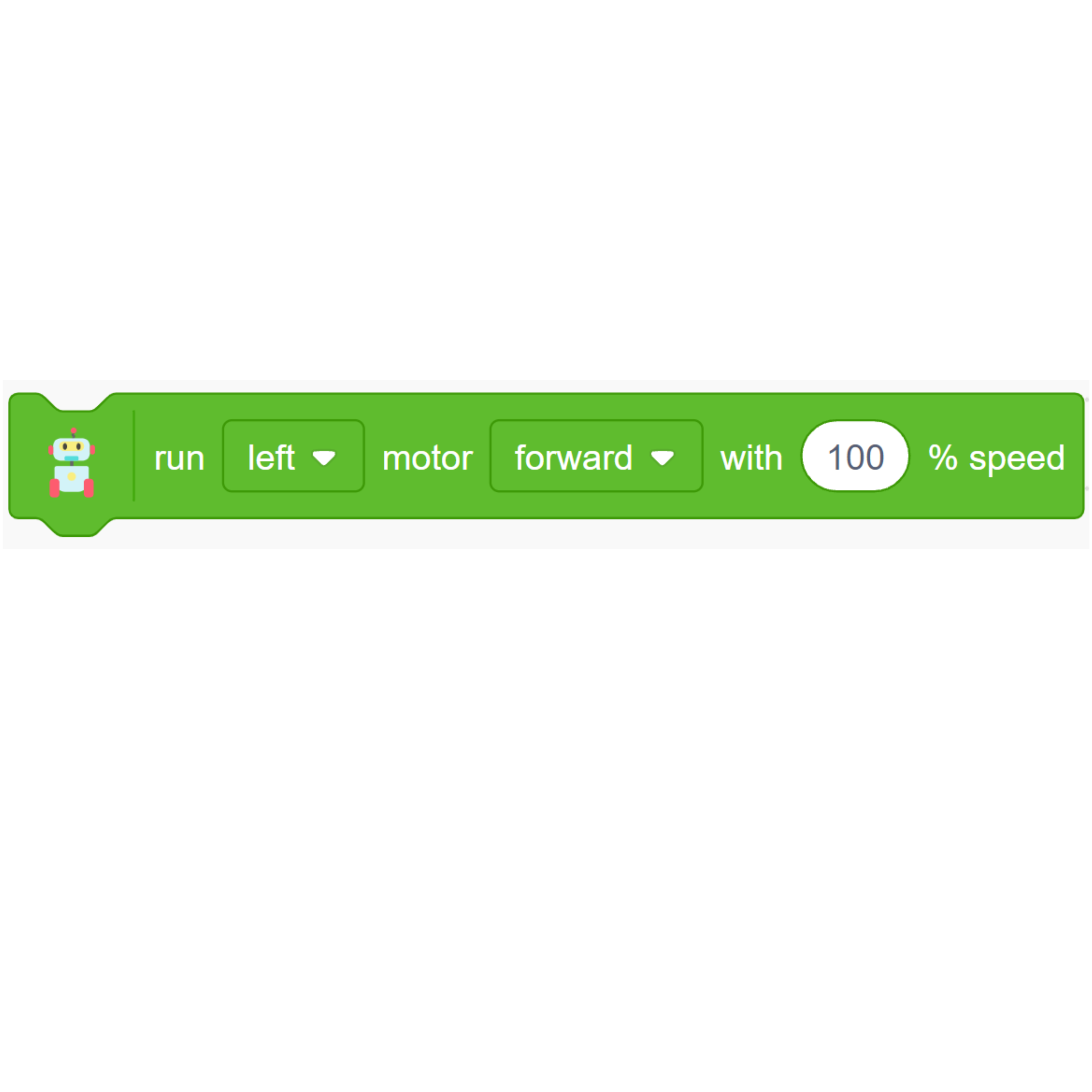
Run motor for direction with % speed
|
บล็อกคำสั่งนี้ จะกำหนดมอเตอร์ที่ระบุของหุ่นยนต์ Quarky หมุนล้อยังทิศทางที่ระบุ (“ไปข้างหน้า” หรือ “ย้อนกลับ”) และสามารถกำหนดความเร็วได้ |
|
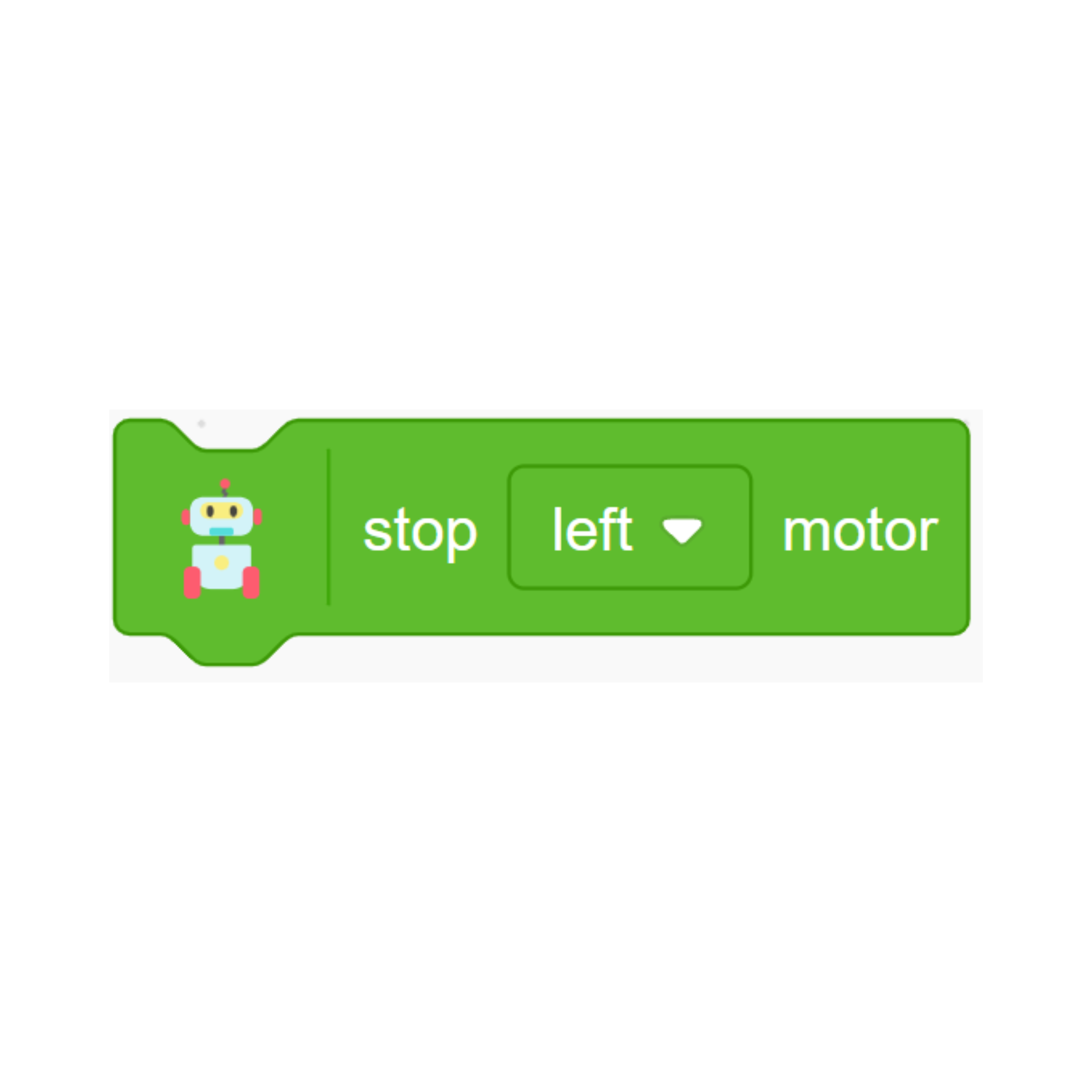
Stop specified motor
|
บล็อกคำสั่งนี้ ฟังก์ชั่นนี้จะหยุดมอเตอร์ที่ระบุของ หุ่นยนต์ Quarky |
|
Set specitified servo to angle
|
บล็อกคำสั่งนี้ จะตั้งค่าเซอร์โวมอเตอร์ที่เชื่อมต่อกับขาเซอร์โวที่ระบุ ให้เป็นมุมที่ระบุ |