


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
The Dog Receiver
THE DOG Receiver
Wireless Transmission คือ การส่งสัญญาณภาพและเสียงไร้สาย โดยมีอุปกรณ์ตัวส่งสัญญาณ(Transmitter) ทำงานร่วมกับอุปกรณ์ตัวรับสัญญาณ (Receiver) ซึ่งตัวส่งสัญญาณจะเชื่อมต่อกับอุปกรณ์ต้นทาง และในบทความนี้เราจะพูดถึงการทำให้ Spike Hub ของเรากลายร่างเป็น Receiver กันซึ่งจะมีความสัมพันธ์กับบทความอย่าง “THE DOG Transmitter”
อันดับแรกจาก บรรทัดที่ 1 ถึง 5 จะเป็นการเรียก,อิมพอร์ต ใช้สำหรับนำเข้าโมดูลหรือไลบรารีภายนอกเข้ามาในโปรแกรมของเรา เพื่อให้เราสามารถใช้ฟังก์ชัน คลาส และตัวแปรที่อยู่ในโมดูลเหล่านั้นได้
ลำดับที่สอง บรรทัดที่ 7 ถึง 10 จะเป็นการตั้งชื่อ มอเตอร์ของเรา แต่ จะพิเศษที่ บรรทัดที่ 7 โดย hub = PrimeHub(observe_channels=[2]) ซึ่ง ตัวเลขตัวท้ายสุดท้ายคือ ช่องสัญญา ต้องตั้งให้ตรงกันทั้งตัวรับและตัวส่ง และในที่นี้ ผมได้ใช้เป็นเลข “2”
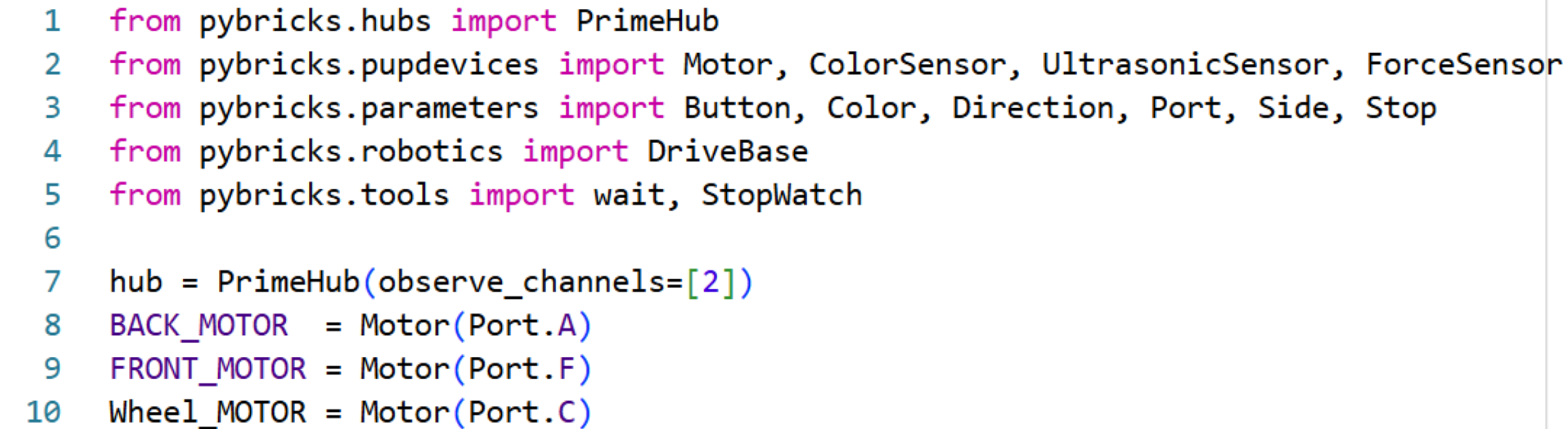
รูปที่ 1
ลำดับที่สาม คือ คำสั่งใช้งานกันแล้ว โดยทุกครั้งที่เปิดเครื่อง ผมก็จะ ให้รับ ค่าสัญญาณ จาก ช่องที่ 2 เสมอ และ เมื่อรับแต่ไม่มีข้อมูล สถานะไฟของ Hub จะเป็นสีเชียว(ปุ่มวงกลมตรงกลาง)
จากนั้นในบรรทัดที่ 15 เป็นต้นไป เมื่อ ฝั่งตัวส่ง ได้ทำการกดปุ่ม หรือ ForceSensor จะให้ทำงานที่แตกต่างกัน ตัวอย่างเลยก็คือ
A ทำการเดินหน้า
C ทำการเดินถอยหลัง
E,F ทำการเลี้ยวซ้ายหรือขวา
และสุดท้าย ถ้าหากไม่ได้กด E หรือ F จะยกเลิกการเลี้ยว ให้หุ่นต์ของเราหันหน้าตรง
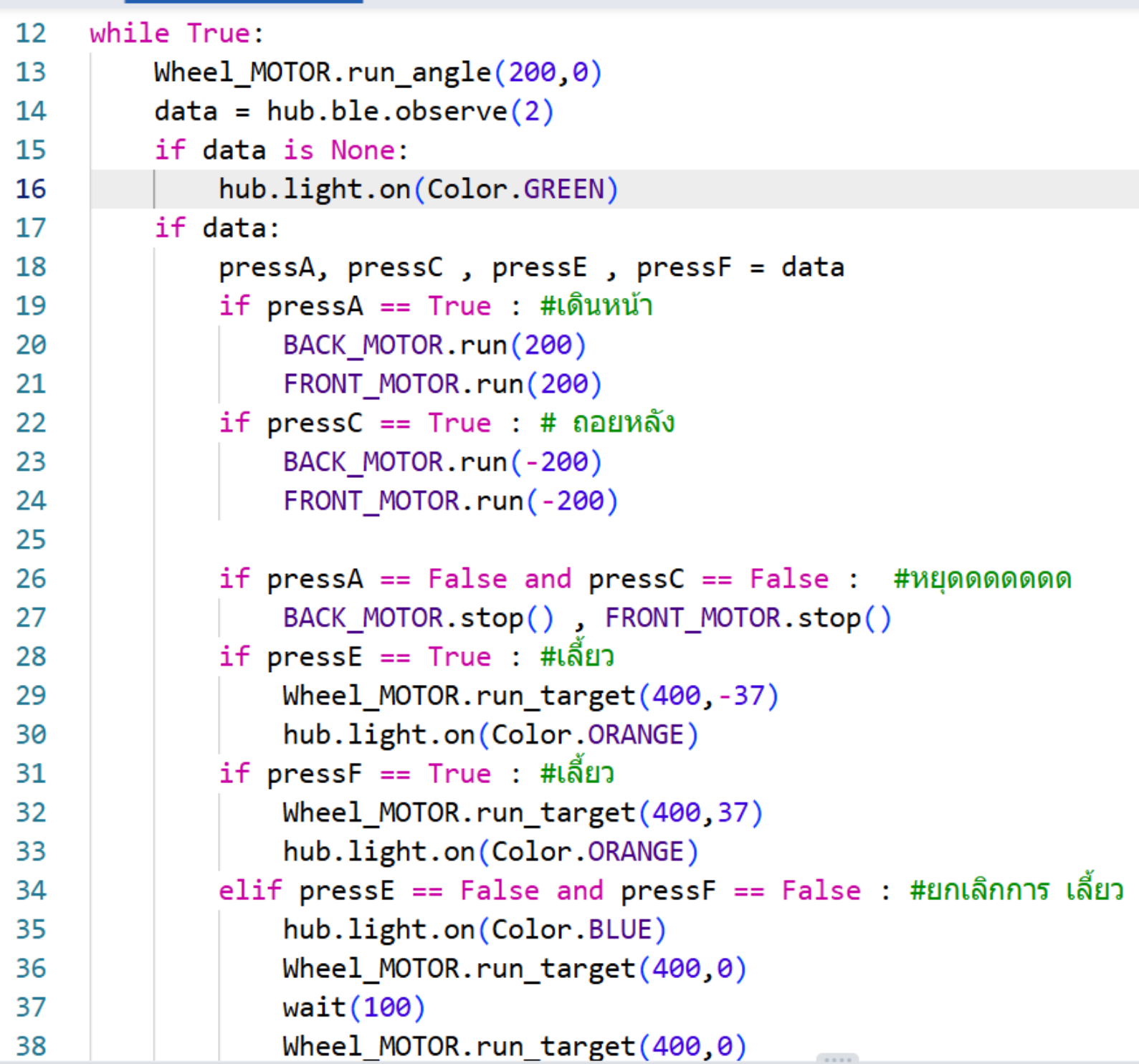
รูปที่ 2