


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
การเขียนโปรแกรมด้วย Python (Controlling Motors)

เชื่อมต่อมอเตอร์เข้ากับพอร์ต A และลองใช้โปรแกรมด้านล่าง

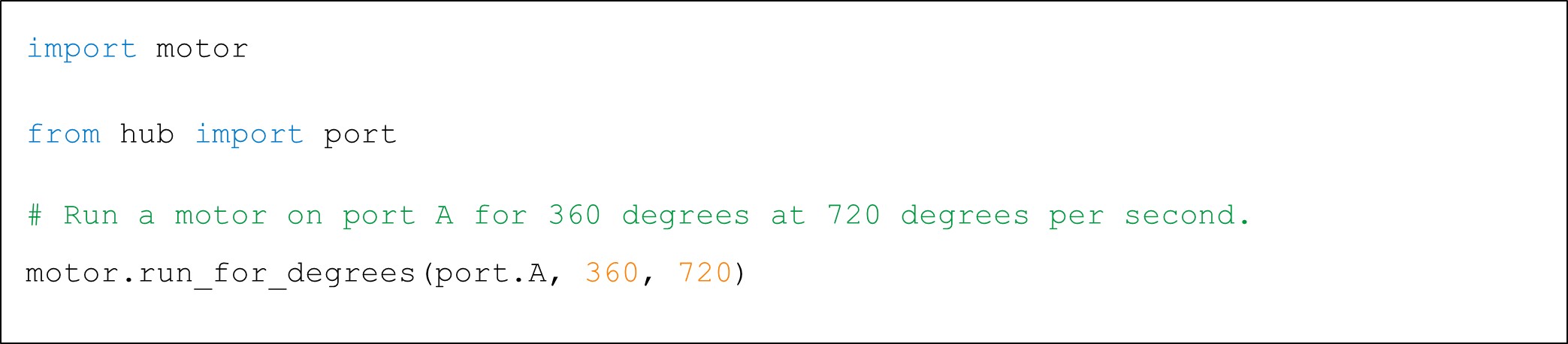
คุณจะเห็นมอเตอร์หมุน 360 องศา (หมุนครบหนึ่งรอบ) ที่ความเร็ว 720 องศา (หมุนสองรอบ) ต่อวินาที
มาดูโค้ดทีละบรรทัดกัน!
บรรทัดแรกจะนำเข้าโมดูล motor ที่ใช้ในการควบคุมมอเตอร์
บรรทัดที่สองจะนำเข้า port จากโมดูล hub ซึ่งใช้เก็บค่าสำหรับแต่ละพอร์ต คุณสามารถเขียน port.A สำหรับพอร์ต A เขียน port.B สำหรับพอร์ต B และอื่น ๆ เพื่อระบุพอร์ตที่คุณต้องการ
บรรทัดสุดท้ายจะเป็นการเรียกใช้ฟังก์ชัน run_for_degrees() ด้วยเงื่อนไขสามอย่าง:
- พารามิเตอร์ตำแหน่งแรกระบุว่าจะเรียกใช้มอเตอร์ตัวใดโดยใช้ค่าของพอร์ต
- พารามิเตอร์ตำแหน่งที่สองระบุจำนวนองศาที่ต้องการให้หมุน
- พารามิเตอร์ตำแหน่งที่สามระบุว่าจะเรียกใช้มอเตอร์ด้วยความเร็วเท่าใดในหน่วยองศาต่อวินาที
Writer : Pacharee Wongcherngyoot
Matawee Waesalaemae
Matawee Waesalaemae

