


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
การเขียนโปรแกรมด้วย Python (Multiple Motors)


เชื่อมต่อมอเตอร์ตัวที่ 1 เข้ากับพอร์ต A เชื่อมต่อมอเตอร์ตัวที่ 2 เข้ากับพอร์ต B และลองใช้โปรแกรมด้านล่าง
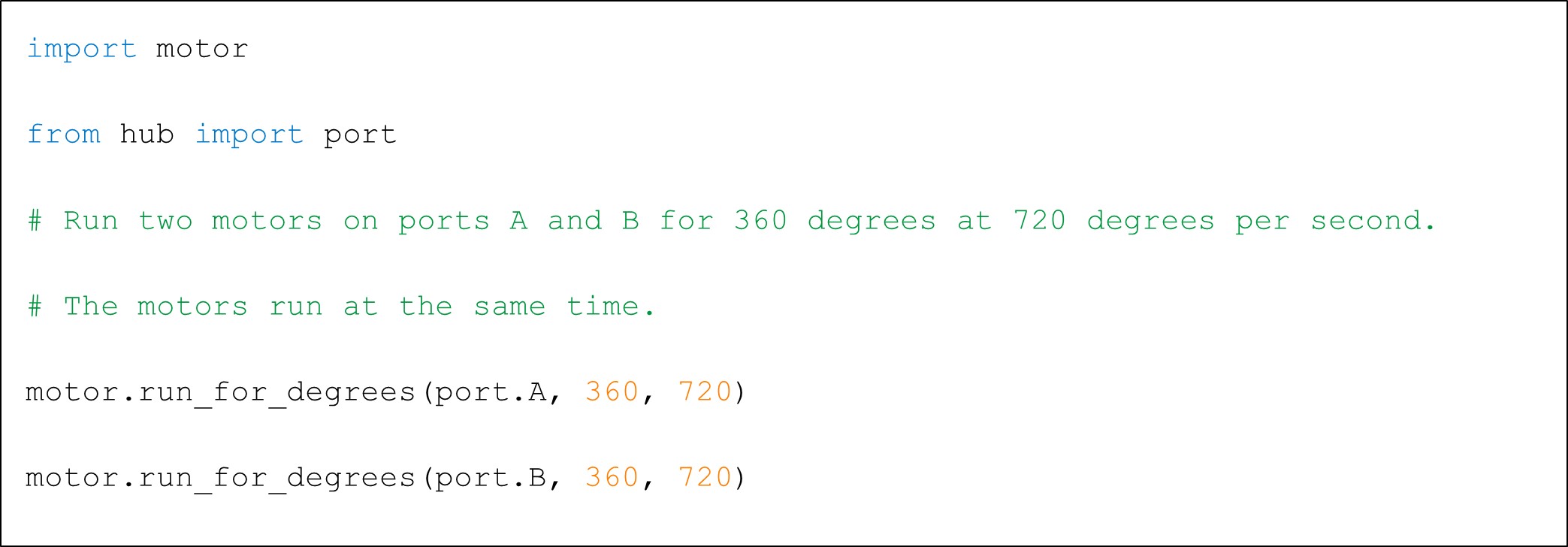
โปรดทราบว่ามอเตอร์ทั้งสองหมุน 360 องศา (หมุนหนึ่งรอบ) ด้วยความเร็ว 720 องศาต่อวินาที โดยเริ่มและสิ้นสุดในเวลาเดียวกัน เนื่องจากคำสั่งมอเตอร์ทั้งสองอยู่บนบรรทัดแยกกัน คุณอาจคาดหวังให้คำสั่งทั้งสองทำงานทีละคำสั่ง อย่างไรก็ตาม คำสั่งทั้งสองทำงานในเวลาเดียวกันเนื่องจาก run_for_degrees() เป็นฟังก์ชัน awaitable ซึ่งหมายความว่าคุณสามารถรอให้ฟังก์ชันทำงานเสร็จได้ แต่คุณไม่จำเป็นต้องรอ โดยค่าเริ่มต้น ของโปรแกรมจะดำเนินการต่อไปยังบรรทัดถัดไปของโค้ดทันทีในขณะที่โค้ด awaitable ทำงานจนเสร็จสมบูรณ์อยู่เบื้องหลัง ซึ่งทำให้สามารถเรียกใช้คำสั่งหลายคำสั่งในเวลาเดียวกันได้
*ความหมายของค่าพารามิเตอร์ฟังก์ชัน run_for_degrees() สามารถดูได้ที่หัวข้อ Controlling Motors*
Matawee Waesalaemae

