


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
การเขียนโปรแกรม Quarky Line Following
ในบทความนี้เราจะพาเพื่อนๆไปเรียนรู้กับหุ่นยนต์เดินตามเส้นกันแบบง่ายๆจนไปถึงขั้นสูง แต่ทว่า ซึ่งก่อนที่จะไปเรียนรู้กันนั้น เราจะพาเพื่อนๆรู้ความหมายของแต่ละบล็อกคำสั่ง และลำดับการสั่งงาน สุดท้ายการปรับเทียบค่าเซนเซอร์
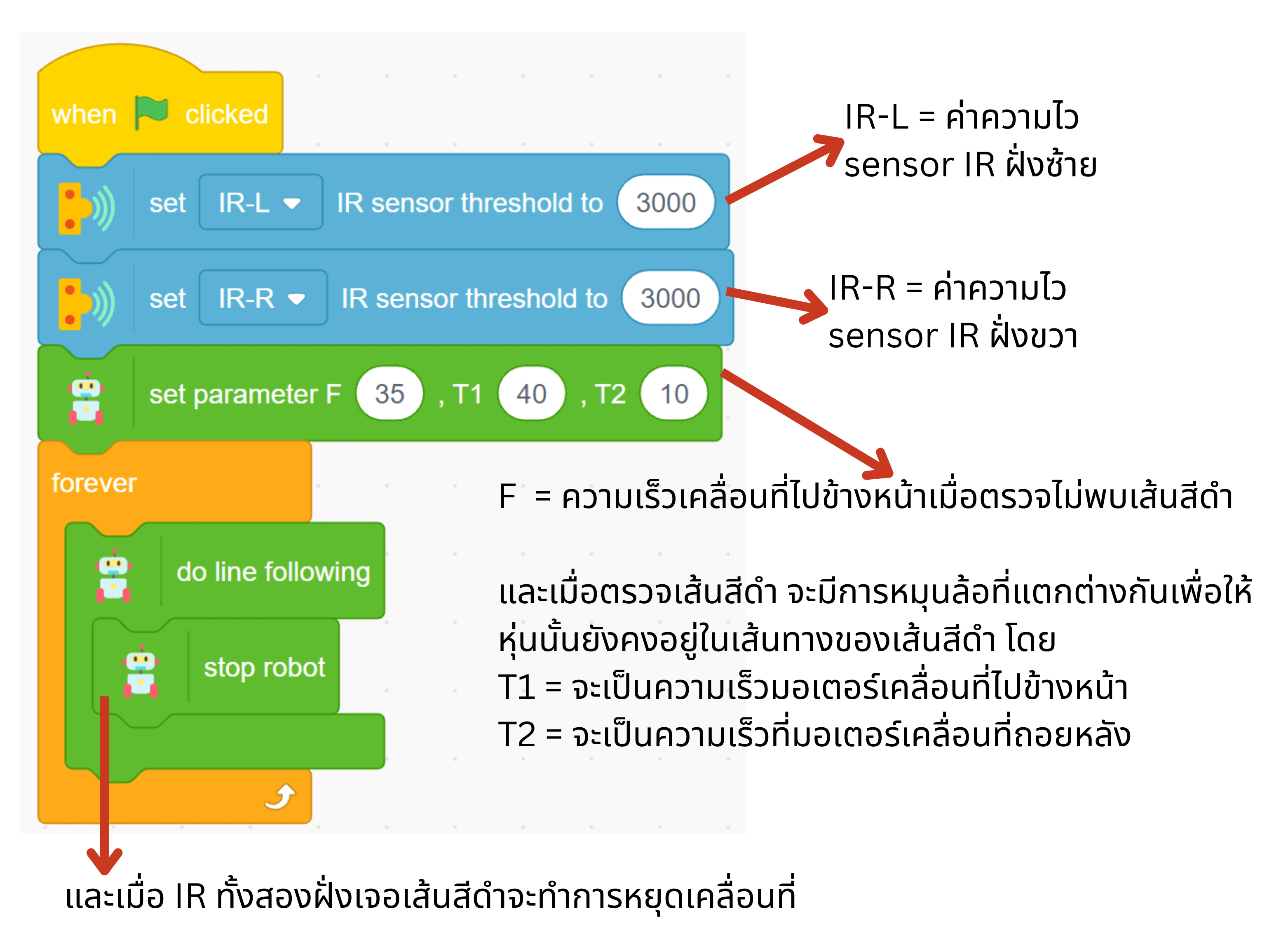
หมายเหตุ : ทุกครั้ง ต้องปรับเทียบเซนเซอร์ IR เพื่อให้หุ่นยนต์ตรวจจับแนวเส้นได้ดีที่สุด นอกจากนี้ ต้องปรับเทียบความเร็วเพื่อให้ความเร็ว F, T1 และ T2 เพื่อให้หุ่นยนต์เดินตามเส้นได้สัมพันธ์กัน
จากตัวอย่างโปรแกรมภาพด่านล่าง จะสังเกตเห็นว่าค่า IR ทั้งสองฝั่งไม่เท่ากัน เมื่อเจอโค้งที่ต้องมีการเลี้ยวนั้น มาดูผลลัพธ์จะเป็นอย่างไร
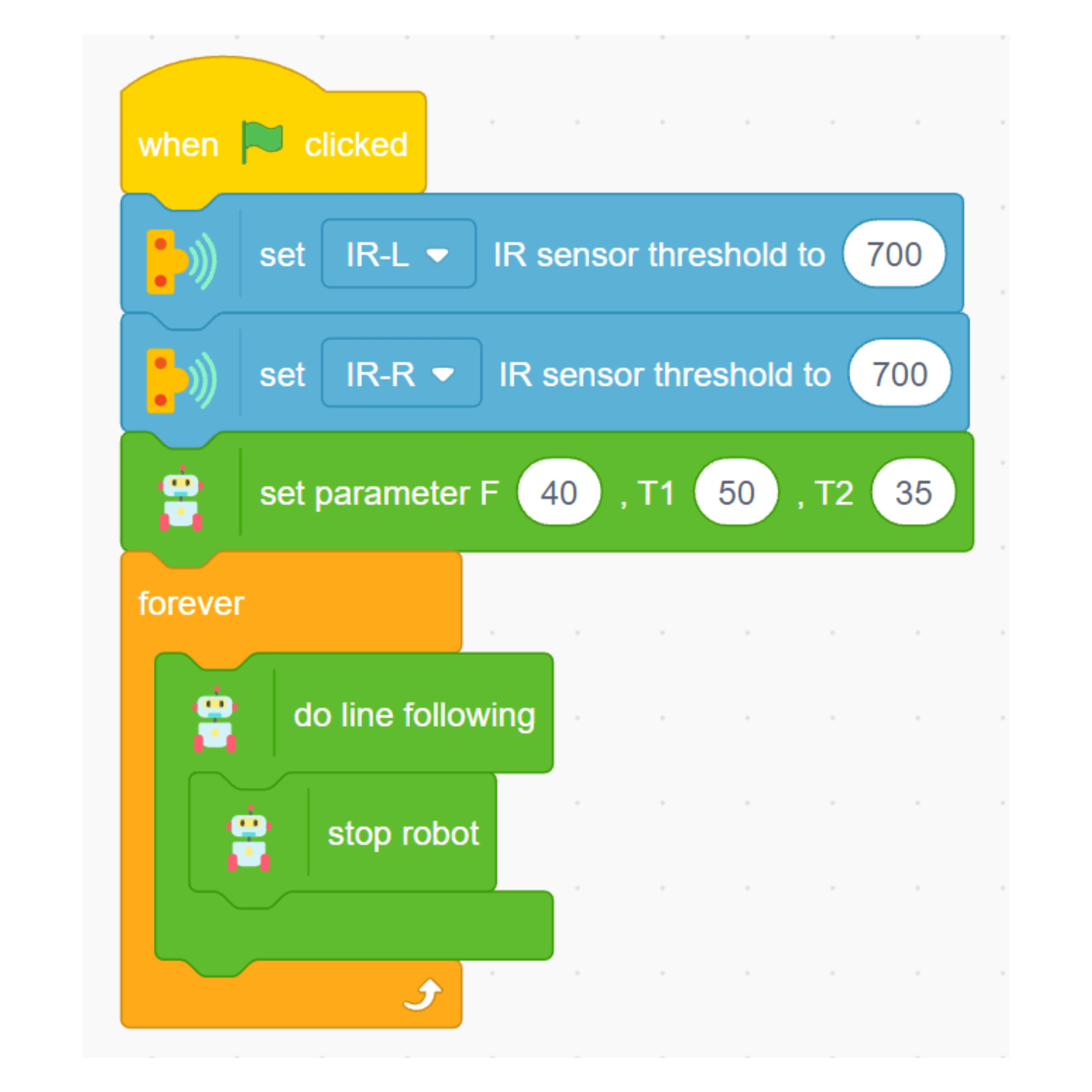
และใน Parameter นั้น F = 40 , T1 = 50 , T2 = 35
โดยเราจะให้สังเกตการณ์ทำงานของ เซนเซอร์ของทั้งการเลี้ยวซ้ายและเลี้ยวขวา
ตัวอย่างโปรแกรมที่ 1 เริ่มต้นโดยตั้งค่า ให้ IR-L ลดลงเป็น 3000 และ IR-R เพิ่มขึ้นเป็น 20
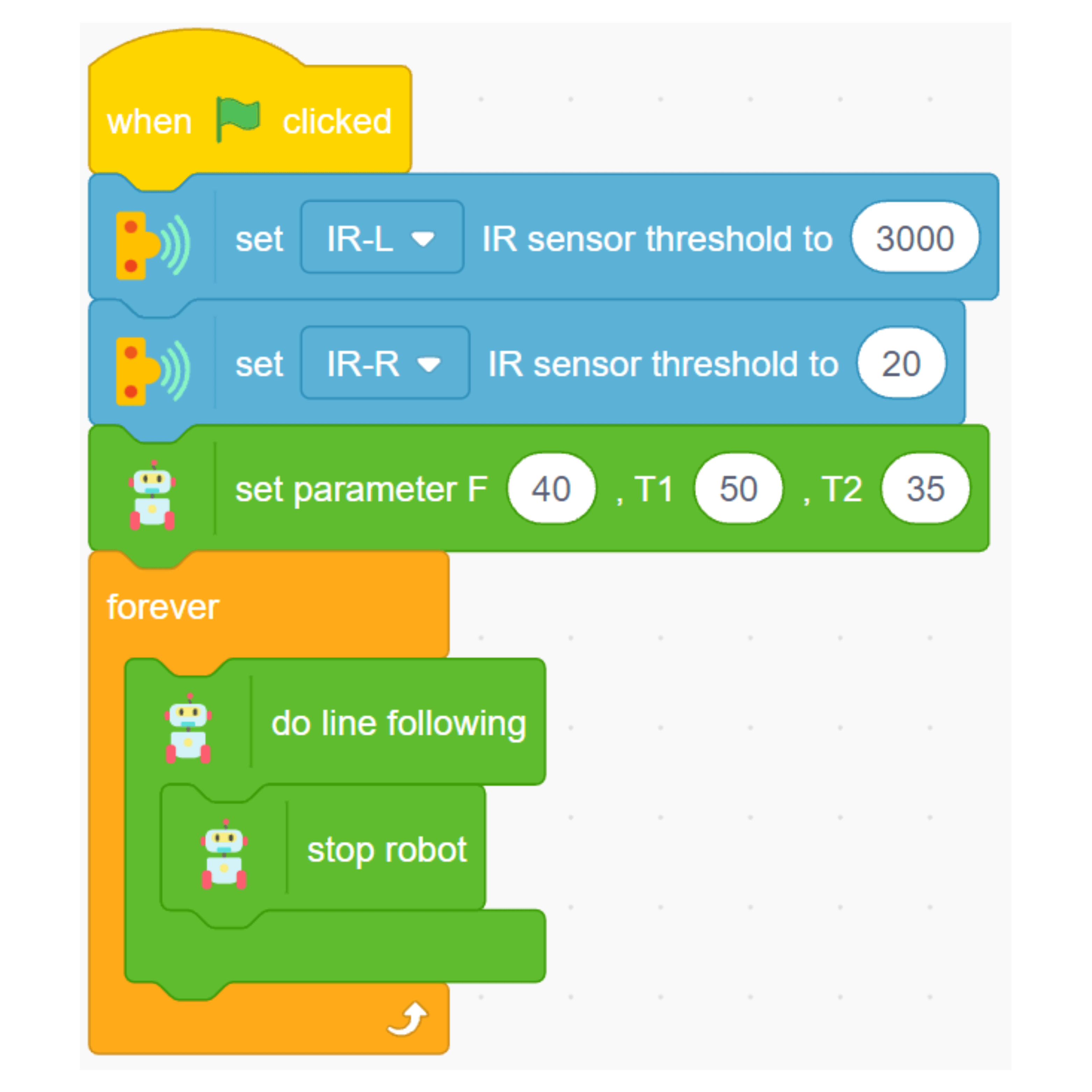
ซึ่งค่าที่เราใส่ไปครั้งแรกนั้น แตกต่างกันอย่างขัดเจน หุ่นยนต์ไม่สามารถจับหรือเดินตามเส้นได้เลย
ตัวอย่างโปรแกรมที่ 2 เริ่มปรับค่า ให้ IR-L ลดลงเป็น 1500 และ IR-R เพิ่มขึ้นเป็น 70 และเราจะให้สังเกตการณ์ทำงานของ เซนเซอร์ของทั้งการเลี้ยวซ้ายและเลี้ยวขวา อีกครั้ง
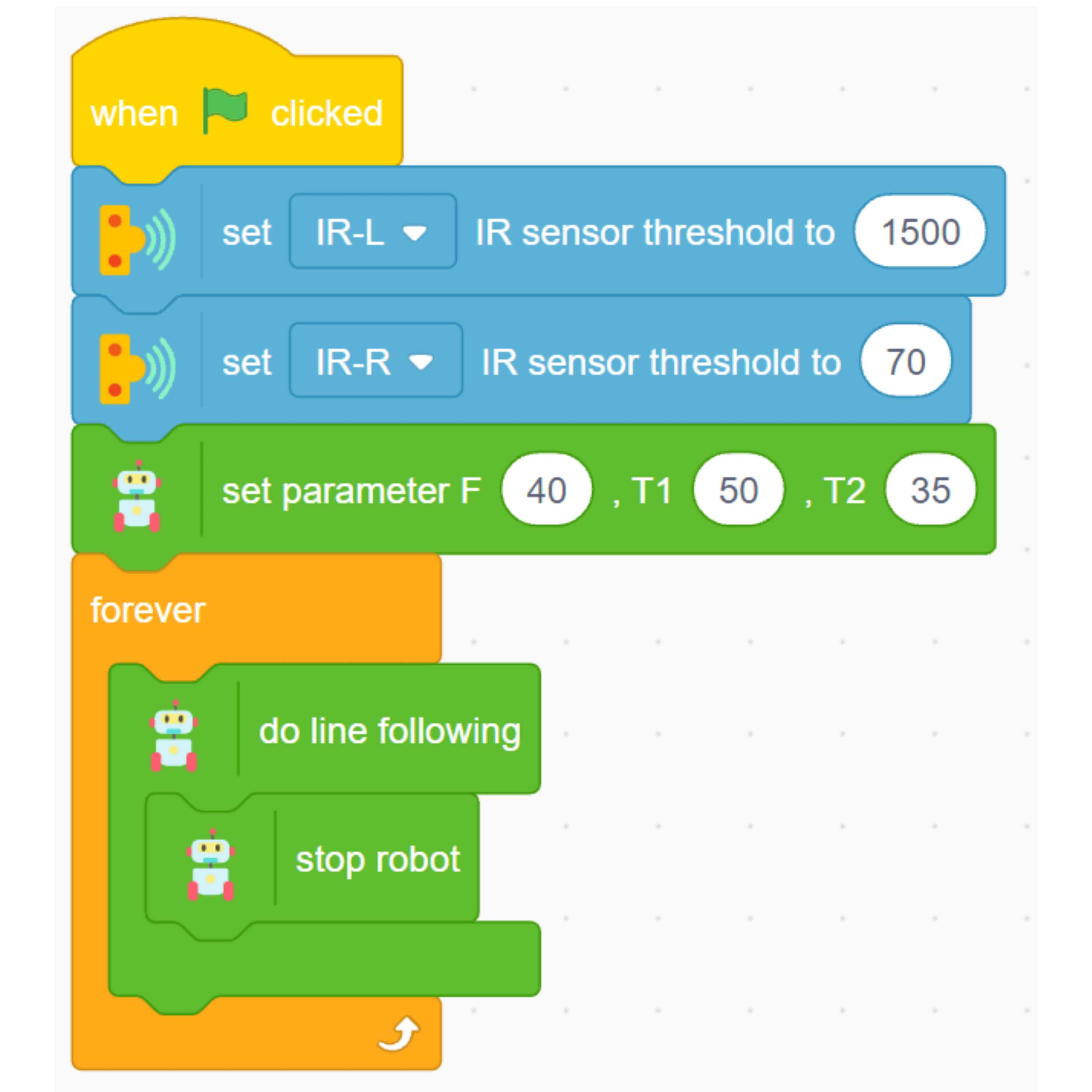
หุ่นยนต์ยังคงเลี้ยวได้ดีขึ้น เพียงแค่ฝั่งซ้าย เท่านั้น เราจะต้องปรับอีก
ตัวอย่างโปรแกรมที่ 3 ปรับค่าใหม่ IR-L ลดลงเป็น 700 และ IR-R เพิ่มขึ้นเป็น 700 และเราจะให้สังเกตการณ์ทำงานของ เซนเซอร์ของทั้งการเลี้ยวซ้ายและเลี้ยวขวา อีกครั้ง
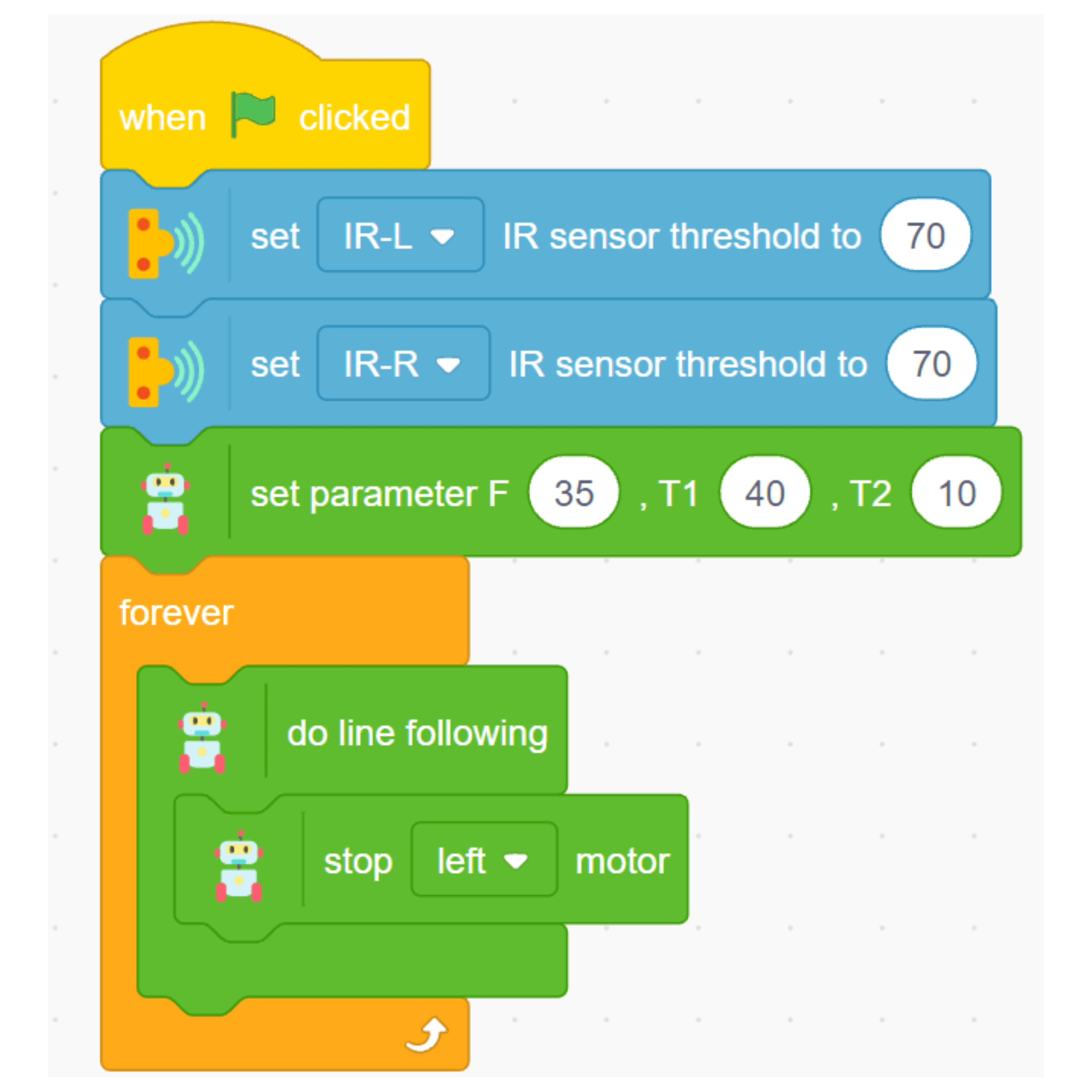
ตัวอย่างโปรแกรมที่ 4 ปรับค่าใหม่ IR-L และ IR-R เป็น 70
เห็นได้ชัดว่าค่า IR มีผลต่อการทำงานของหุ่นยนต์ของเรา เพราะฉะนั้น เราควรปรับจูนค่าที่เหมาะสมก่อนจะให้หุ่นยนต์ทำงานเพื่อให้ได้ผลลัพธ์ที่ดีพึงพอใจที่สุดครับผม และอย่าลืมที่จะปรับ set parameter ด้วยเช่นกันเพื่อค่านั้นสัมพันธ์กัน
