


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
การเขียนโปรแกรมด้วย Word Blocks (More Motor Blocks)

บล็อกคำสั่งเหล่านี้เพิ่มฟังก์ชันการทำงานของ Motor เพื่อให้คุณมีโอกาสในการเขียนโปรแกรมมากยิ่งขึ้น
|
Go to Relative Motor Position at Speed
|
บล็อกคำสั่งนี้สั่งงานมอเตอร์ตั้งแต่ 1 ตัวขึ้นให้หมุนไปยังตำแหน่งสัมพัทธ์ด้วยความเร็วที่กำหนด ซึ่งแตกต่างจากตำแหน่งสัมบูรณ์ที่ใช้ในบล็อก Go to Position ตำแหน่งสัมพันธ์นี้ไม่มีขีดจำกัดช่วงและสามารถตั้งค่าล่วงหน้าได้ด้วยบล็อก Set Relative Motor Position to 0 |
|
Set Relative Motor Position to 0
|
บล็อกคำสั่งนี้จะตั้งค่าตำแหน่งสัมพัทธ์ของมอเตอร์ตั้งแต่หนึ่งตัวขึ้นไปให้เป็นค่าที่ระบุ ใช้ค่า "0" เพื่อรีเซ็ตตำแหน่งสัมพัทธ์ |
|
Relative Motor Position
|
บล็อกคำสั่งนี้จะส่งผลลัพธ์เป็นจำนวนองศาของมอเตอร์ที่กำหนด นับตั้งแต่ที่โปรแกรมเริ่มทำงาน สามารถรีเซ็ตได้โดยใช้บล็อกคำสั่ง Set Relative Motor Position to 0 |
|
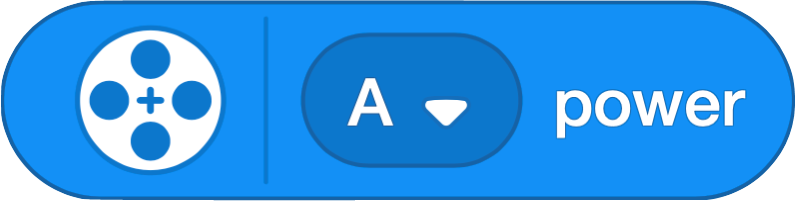
Start Motor with Power
|
บล็อกคำสั่งนี้จะสั่งหมุนมอเตอร์ตั้งแต่หนึ่งตัวขึ้นไปตามเปอร์เซ็นต์ของกำลังที่กำหนด เมื่อใช้งานมอเตอร์ตามความเร็ว กำลังของมอเตอร์จะถูกควบคุมเพื่อรักษาความเร็วที่กำหนด |
|
Motor Power
|
บล็อกคำสั่งนี้จะส่งผลลัพธ์ระดับกำลังที่ใช้ในมอเตอร์ที่กำหนดเป็นเปอร์เซ็นต์ |
|
Stop and Coast Motors
|
บล็อกคำสั่งนี้ระบุว่ามอเตอร์จะหยุดอย่างไรเมื่อใช้บล็อกมอเตอร์ที่มีระยะเวลาที่กำหนด หรือบล็อกคำสั่ง Stop Motor สามารถหยุดได้ 3 วิธีที่แตกต่างกัน:
Brake: คำสั่งนี้เป็นการหยุดมาตรฐาน ซึ่งมอเตอร์จะใช้กำลังในการเบรกเมื่อหยุด และใช้แรงเสียดทานกับมอเตอร์ในภายหลัง Hold position: มอเตอร์ใช้กำลังในการเบรกและหมุนมอเตอร์กลับไปยังตำแหน่งที่หยุดหากถูกบังคับให้ออกจากตำแหน่งนั้น Coast: กระแสไฟฟ้าที่ส่งไปยังมอเตอร์จะถูกตัดเมื่อหยุด |
|
Set Motor Acceleration
|
บล็อกคำสั่งนี้จะตั้งค่าการเร่งความเร็วและการชะลอความเร็วของมอเตอร์ตั้งแต่หนึ่งตัวขึ้นไป การเร่งความเร็วสามารถตั้งค่าให้เร็ว ปานกลาง หรือช้าได้ การเร่งความเร็วเริ่มต้นคือปานกลาง
การเร่งความเร็วแบบกำหนดเองสามารถตั้งค่าได้ด้วยการป้อนตัวแปรโดยให้ตัวเลขสองตัวคั่นด้วยช่องว่าง ตัวเลขแรกจะตั้งค่าการเร่งความเร็ว ตัวเลขที่สองจะตั้งค่าการชะลอความเร็ว ช่วงคือ 1-10000 โดยตัวเลขที่สูงกว่าจะระบุว่าเร่งความเร็วได้เร็วขึ้น ค่าเริ่มต้นคือ:
เร็ว = 10000 ปานกลาง = 2000 สำหรับมอเตอร์ขนาดเล็ก = 4000 สำหรับมอเตอร์ขนาดกลางและขนาดใหญ่ ช้า = 1000 |






Matawee Waesalaemae

