


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
ติดตั้ง Software บน Ubuntu และทดสอบ Build HAT
บทที่ 5: “ติดตั้ง Software บน Ubuntu และทดสอบ Build HAT”

เมื่อฮาร์ดแวร์ทุกอย่างประกอบเสร็จสมบูรณ์ ขั้นตอนถัดไปคือการเตรียมระบบปฏิบัติการ Ubuntu ให้พร้อมสำหรับใช้งาน Build HAT ในบทนี้ เราจะสอนวิธีติดตั้งไลบรารีที่จำเป็นสำหรับควบคุมมอเตอร์และเซนเซอร์ LEGO ผ่าน Python รวมถึงทดสอบการเชื่อมต่อเพื่อให้แน่ใจว่า Build HAT พร้อมสำหรับโปรเจกต์หุ่นยนต์ของเราอย่างสมบูรณ์
ขั้นตอนการติดตั้งและเปิดใช้งาน Build HAT
- ติดตั้ง Python และ pip (กรณียังไม่ได้ติดตั้ง)

- ติดตั้งไลบรารี buildhat

- ตรวจสอบและตั้งค่า serial0 ให้ลิงก์ไปที่ AMA0

ถ้าไม่เจอ serial0 หรือมี port อื่นที่ลิ้งไป /dev/ttyAMA0 อยู่แล้วให้ทำตามขั้นตอนดังนี้

เพิ่ม/แก้ไข บรรทัดนี้

กด Ctrl+X แล้ว Y และ Enter เพื่อบันทึกและออก จากนั้น reboot อุปกรณ์เพื่อให้ระบบเริ่มต้นใหม่

หลังจากเปิดขึ้นมา ให้ตรวจสอบ serial0 อีกครั้ง

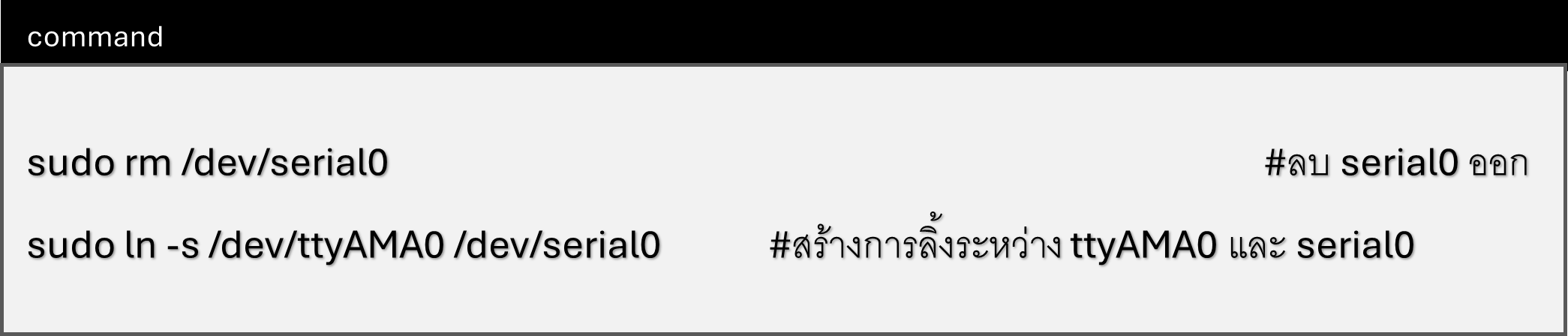
ควรจะได้ผลลัพธ์ดังนี้ /dev/serial0 ->ttyAMA0 แต่ถ้าหากพบ serial0 แล้วแต่การลิ้งยังไม่ถูกต้อง เราอาจจะต้องสร้างการลิ้งใหม่โดยการ
- เพิ่ม user ให้เข้าใช้งานกลุ่ม dialout

- ทำการ reboot อีกครั้ง

สร้างไฟล์ Python เพื่อทดสอบการเชื่อมต่อ Build HAT
- เปิด Terminal บน Ubuntu (กรณีต่อจอ) หรือ ssh เข้าไปทำงาน
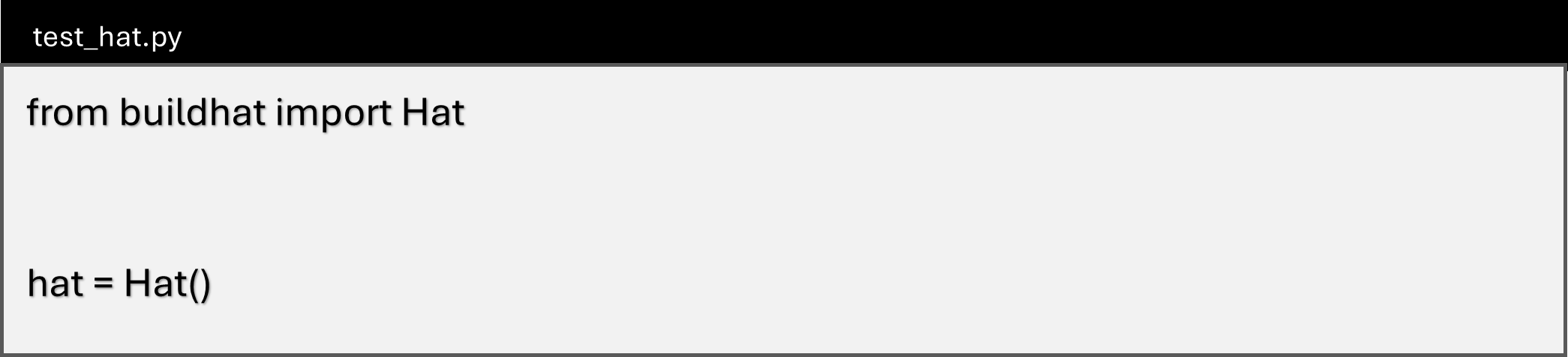
- สร้างไฟล์ชื่อ test_hat.py

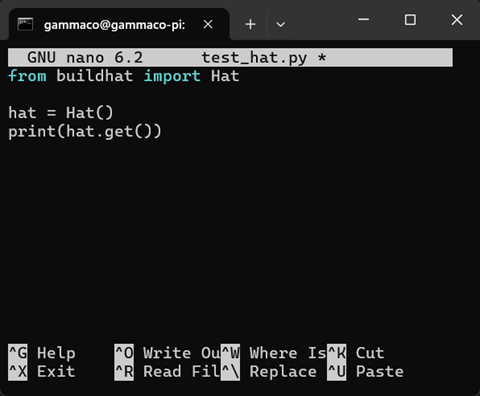
- พิมพ์โค้ดนี้ลงไปในไฟล์
- ทำการบันทึกไฟล์ ด้วยการกด Ctrl+X แล้ว Y และ Enter เพื่อบันทึกและออก
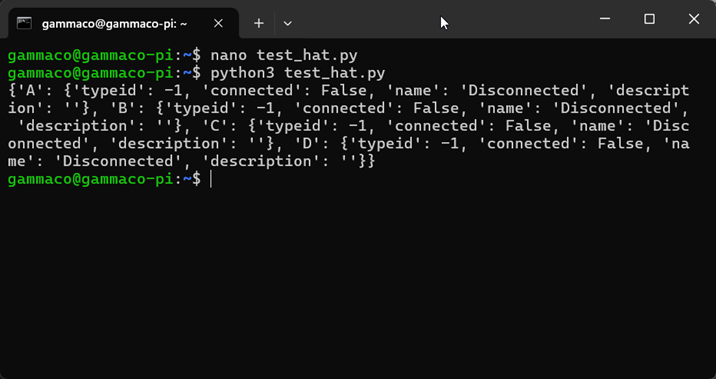
- รันโปรแกรมเพื่อลองเชื่อมต่อ Build HAT

ผลลัพธ์ที่ควรได้รับ คือ ข้อมูลสถานะของ Build HAT แสดงออกมาทางหน้าจอ
ทดลองต่อมอเตอร์และเซนเซอร์แสงเพื่อทดสอบ
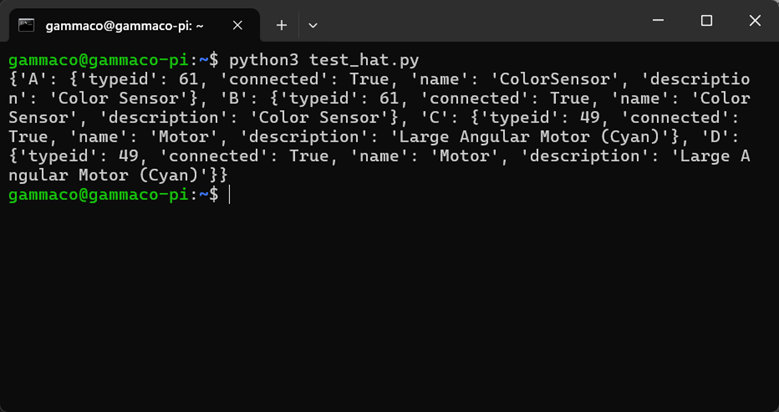
จากตัวอย่างนี้ เราจะเห็นได้ว่าระบบจะแสดงข้อมูลอุปกรณ์ LEGO ที่เชื่อมต่ออยู่กับ Build HAT ขึ้นมาว่าแต่ละพอร์ตมีอุปกรณ์ประเภทใดบ้าง เช่น มอเตอร์หรือเซนเซอร์แต่ละชนิด ช่วยให้เราตรวจสอบการเชื่อมต่อได้อย่างง่ายดาย
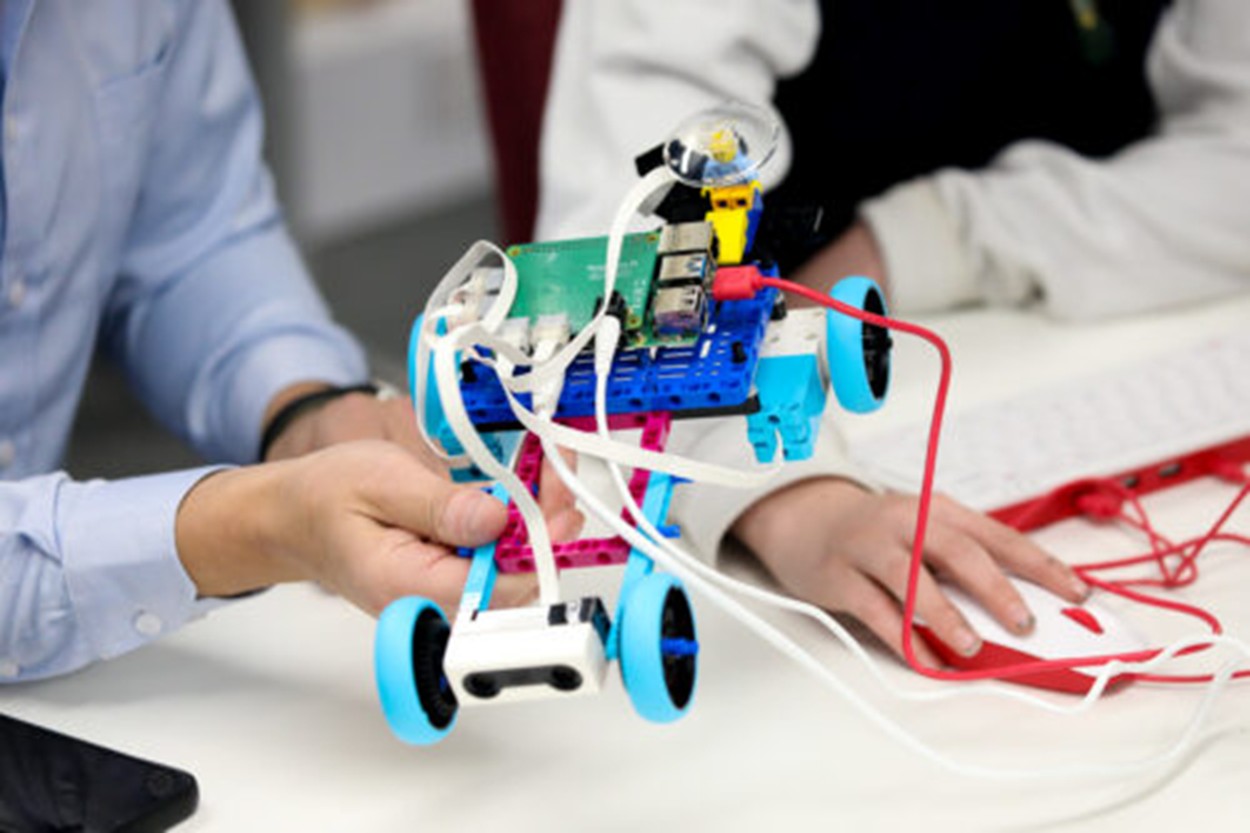
ตอนนี้เราได้เชื่อมต่อ Raspberry Pi เข้ากับ Build HAT และทดสอบการทำงานเบื้องต้นได้เรียบร้อยแล้ว นั่นหมายความว่า เราสามารถเริ่มต้นสร้างสรรค์โปรเจกต์หุ่นยนต์ LEGO ในแบบที่เราจินตนาการไว้ได้อย่างเต็มที่
ในบทถัด ๆ ไป จะพาทุกคนไปเจาะลึกวิธีใช้งานฟังก์ชันต่าง ๆ ของเซนเซอร์และมอเตอร์แต่ละประเภท เพื่อให้คุณใช้งานอุปกรณ์เหล่านี้ได้อย่างมืออาชีพกัน