


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
รถเอ๋ยจงหยุดเมื่อเจอกำแพง

ในบทความนี้นอกจากการสั่งให้หุ่นเคลื่นอที่ไปเป็นระยะทางที่ต้องการ ผมได้เสริมคำสั่งลัดอย่าง function definition ด้วย เพื่อให้เพื่อนๆเรียกใช้ได้ง่ายขึ้น
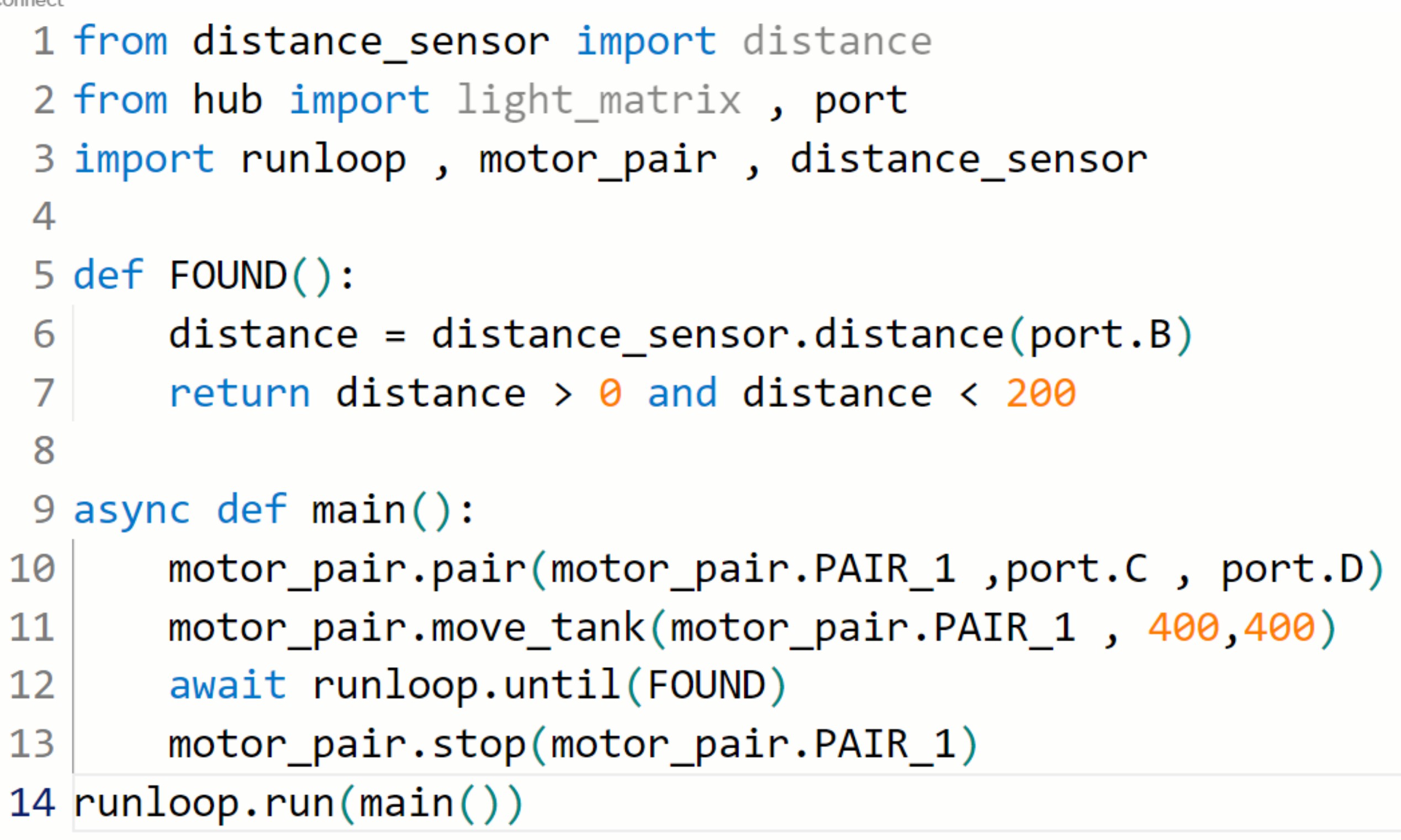
และสำหรับ คำสั่ง บรรทัดที่ 5 ถึง 7 เป็นคำสั่ง DEF ย่อมาจาก "definition" และใช้เพื่อ กำหนดหรือสร้างฟังก์ชัน การใช้ def ช่วยให้โปรแกรมเมอร์สามารถสร้างชุดคำสั่งที่ทำงานเฉพาะอย่างและเรียกใช้งานได้หลายครั้ง ซึ่งเรานำมาสร้าง คำสั่งลัด
เมื่อ เจอระยะที่ต้องการ ในตัวอย่างโค้ด คือ 20 cm ให้คืนค่าแล้วทำบางอย่าง ซึ่งเพื่อนๆสามารถที่จะเปลี่ยนจตัวเลขในบรรทัดที่ 7 ได้เลย “distance > 0 and distance < 200”
และ บรรทัดที่ 11 คือนำมาใช้งาน จะสังเกตว่า เราได้สั่งให้เดินหน้าไปตลอด และ “await” หรือ “wait until” ใน world Block รอจนกว่าจะตรงเงื่อนไข ซึ่งเราได้ตั้งไว้ว่า รอจนกว่าจะเจอระยะ 20 cm นั้นเอง และ หุ่นยนต์จะหยุด ตามลำดับของบรรทัดที่ 13
เท่านี้เราก็จะสามารถเคลื่อนที่จนกว่าจะเจอกำแพงได้แล้วครับ