


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
เคลื่อนที่เป็นระยะทางเป็น ซม ด้วย Python
ในบทความนี้นอกจากการสั่งให้หุ่นเคลื่นอที่ไปเป็นระยะทางที่ต้องการ ผมได้เสริมคำสั่งลัดอย่าง function definition ด้วย เพื่อให้เพื่อนๆเรียกใช้ได้ง่ายขึ้น
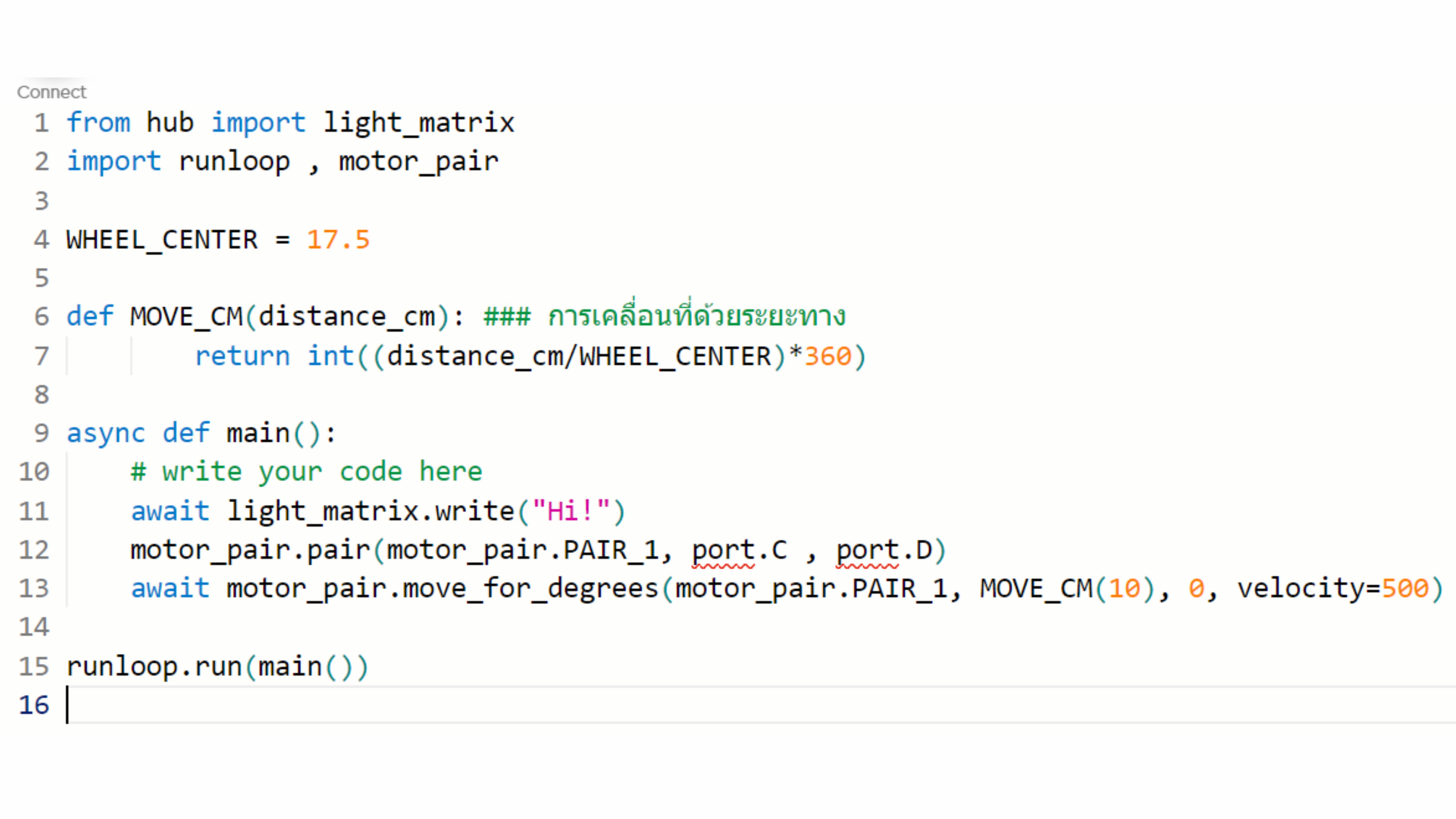
และสำหรับ คำสั่ง บรรทัดที่ 6 ถึง 7 เป็นคำสั่ง DEF ย่อมาจาก "definition" และใช้เพื่อ กำหนดหรือสร้างฟังก์ชัน การใช้ def ช่วยให้โปรแกรมเมอร์สามารถสร้างชุดคำสั่งที่ทำงานเฉพาะอย่างและเรียกใช้งานได้หลายครั้ง ซึ่งเรานำมาสร้าง คำสั่งลัด โดย
สูตรคือ (ระยะทางที่ต้องการ / ขนาดล้อ) * 360
และ บรรทัดที่ 13 คือนำมาใช้งาน จะสังเกตุว่า เราแค่เติมระยะทางที่ต้องการใน “distance_cm” ใน คำสั่ง MOVE_CM(distance_cm)
เราก็แค่นำ def ที่สร้างมา เสริมใน หมวดการทำงานของ move_for_degrees
เท่านี้เราก็จะสามารถเคลื่อนที่เป็นระยะทางได้ อย่างง่ายแล้ว
Writer : Pongsakorn Panthumano