


ผู้จัดจำหน่ายและนำเข้า อุปกรณ์ทางวิทยาศาสตร์ อุปกรณ์ห้องแลป และสื่อการเรียนการสอน
50th Anniversary
เจาะลึกโหมดต่างๆ ของ Color sensor
บทที่ 9: “เจาะลึกโหมดต่างๆ ของ Color sensor

หลังจากที่เราได้ลองใช้งาน Color Sensor ในแบบพื้นฐานกันไปแล้ว ไม่ว่าจะเป็นการอ่านค่าแสงรอบข้าง แสงสะท้อน หรือการตรวจจับสี ซึ่งทำให้หุ่นยนต์เริ่ม “มองเห็น” สิ่งรอบตัวได้บ้างแล้ว แต่ความจริงแล้ว Color Sensor ยังมีความสามารถมากกว่านั้น เพราะมันสามารถส่งข้อมูลออกมาได้หลายรูปแบบ หรือที่เรียกว่า โหมด (Mode)
แต่ละโหมดมีข้อดีและลักษณะการใช้งานที่แตกต่างกัน เช่น โหมด Reflected ที่เหมาะกับการเดินตามเส้น โหมด Ambient สำหรับวัดแสงสภาพแวดล้อม หรือโหมด RGBI / HSV ที่ช่วยแยกเฉดสีอย่างละเอียดมากขึ้น
ในบทนี้ เราจะมาเจาะลึกโหมดต่าง ๆ ของ Color Sensor ทำความเข้าใจว่ามันคืออะไร คืนค่าแบบไหน และควรเลือกใช้งานเมื่อไร เพื่อให้คุณสามารถดึงศักยภาพของเซนเซอร์ตัวนี้ออกมาใช้ได้เต็มที่กับโปรเจกต์หุ่นยนต์ LEGO ของคุณ
RGB Color Mode
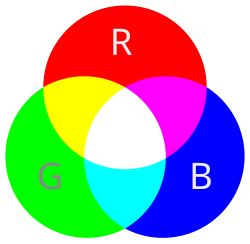
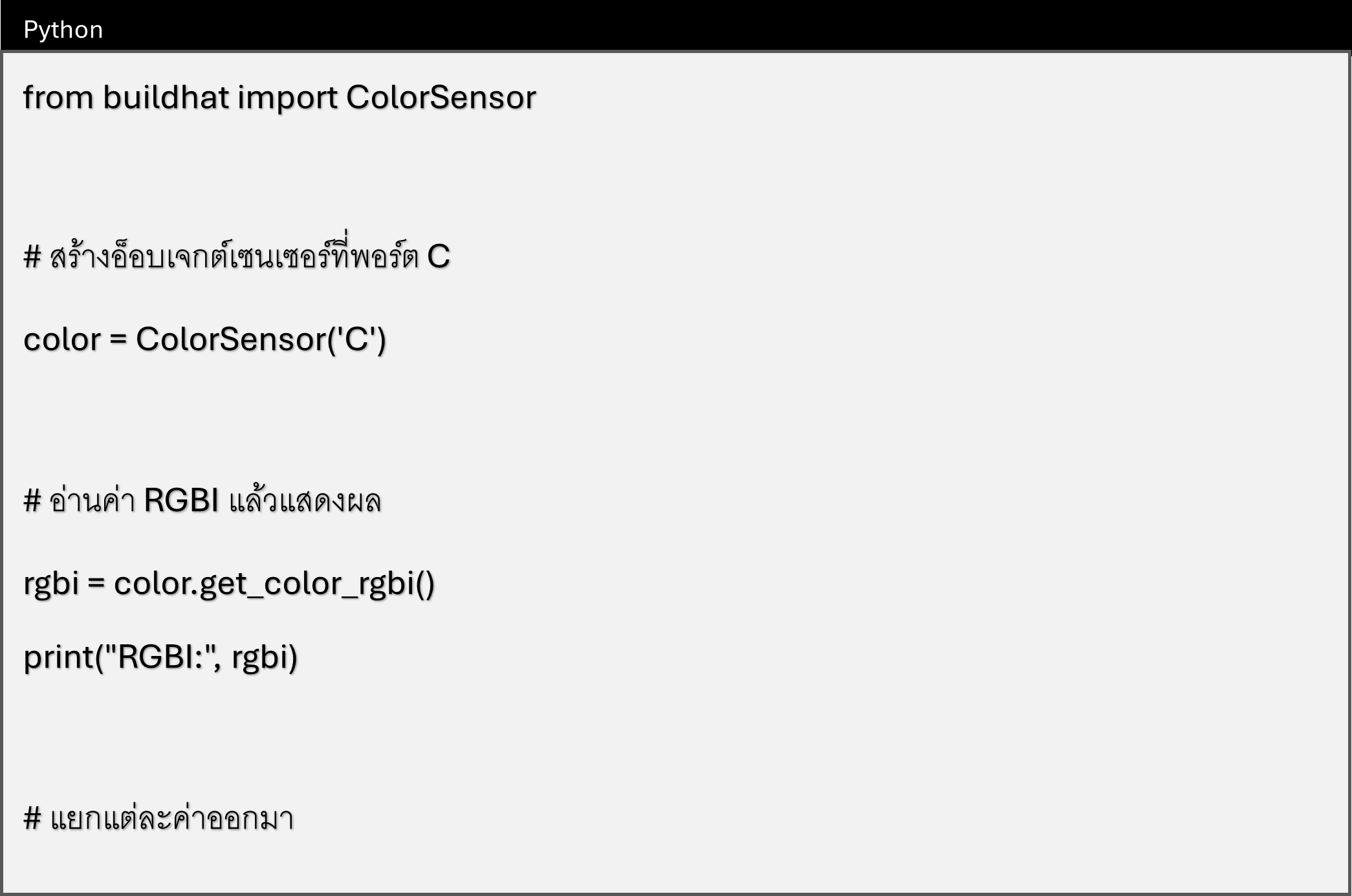
RGB ย่อมาจาก red, green และ blue คือ กระบวนการผสมสีจากแม่สี 3 สี คือสีแดง สีเขียว และสีน้ำเงิน โดยคำสั่ง get_color_rgbi() จะคืนค่าออกมาเป็น list 4 ค่า ได้แก่ [R, G, B, I]
- R, G, B = ค่าสีแดง เขียว น้ำเงิน (0–255)
- I = Intensity หรือความเข้มของแสง (0–255)
HSV Color Mode
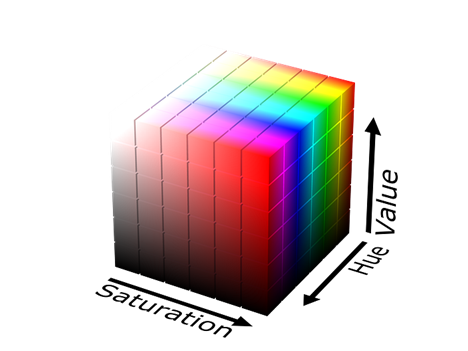
HSV ย่อมาจาก Hue, Saturation และ Lightness คือ กระบวนการผสมกันของ Hue (ค่าสี) , Saturation (ค่าความอิ่มตัวสี) และ Value (ค่าความสว่างของแสง) ทำให้สีที่ผสมกันมีค่าความสว่าง และ ความเข้มไม่เท่ากัน โดยคำสั่ง get_color_hsv() จะคืนค่าออกมาเป็น tuple (H, S, V)
- H (Hue): เฉดสี วัดเป็นองศา 0–360° เช่น 0 = แดง, 120 = เขียว, 240 = น้ำเงิน
- S (Saturation): ความสดของสี (0–100) ยิ่งสูงยิ่งสีสด จางลงจะกลายเป็นเทา
- V (Value): ความสว่างของสี (0–100) ยิ่งสูงยิ่งสว่าง ถ้าต่ำคือสีมืด

Ambient Mode
Ambient Mode คือโหมดการทำงานของ Color Sensor ที่ใช้สำหรับวัด ความสว่างของแสงรอบข้าง (Ambient Light) โดยคำสั่ง get_ambient_light() จะคืนค่าออกมาเป็น Int 0 – 100

Reflected Mode
Reflected Mode คือโหมดการทำงานของ Color Sensor ที่ใช้สำหรับวัด ปริมาณแสงที่สะท้อนกลับจากวัตถุ โดยที่เซนเซอร์จะยิงไปยังวัตถุ แล้วตรวจจับว่าแสงสะท้อนกลับมามากหรือน้อยแค่ไหน โดยคำสั่ง get_reflected_light() จะคืนค่าออกมาเป็น Int 0 – 100
เมื่อเราได้เรียนรู้การทำงานของ Color Sensor และการเลือกใช้โหมดต่าง ๆ ไม่ว่าจะเป็นการตรวจแสงรอบข้าง แสงสะท้อน หรือการจำแนกสี ก็จะเห็นว่าหุ่นยนต์ของเราสามารถ “รับรู้โลกด้วยสายตา” ได้แล้วในระดับหนึ่ง แต่หุ่นยนต์ที่ดีนั้น ไม่เพียงแค่แยกแยะสีหรือแสงเท่านั้น ยังต้องรู้จักวัด “ระยะทาง” เพื่อหลบหลีกสิ่งกีดขวางหรือหยุดในตำแหน่งที่ต้องการได้อย่างแม่นยำด้วย
ในบทถัดไป เราจะมาทำความรู้จักกับ Ultrasonic Sensor เซนเซอร์ที่ทำให้หุ่นยนต์ LEGO ของเรามีความสามารถเหมือนมีดวงตา คอยบอกระยะทางของวัตถุด้านหน้า และช่วยให้หุ่นยนต์ตัดสินใจได้ชาญฉลาดยิ่งขึ้น